
研究所簡介
科研團隊
總體定位及方向
科研成果
機器人應用技術中心
1、研究所簡介
機器人應用技術中心依托華中科技大學數字制造裝備與技術國家重點實驗室、上海交通大學機器人研究所等科研機構,跟蹤國際先進機器人技術研究成果,開展航空、航天、汽車、新能源、光伏領域的機器人應用技術研究,開發出的飛機蒙皮銑削加工機器人、大行程非接觸測量機器人、視覺導引機器人在國內外處于領先地位,可以為航空、航天、汽車、新能源等高端制造企業提供機器人加工系統總體解決方案和機器人智能加工裝備,提供機器人加工、機器視覺檢測、機器人標定、大行程非接觸式測量等機器人應用技術研發與服務。
2、承擔項目
|
項目名稱 |
主管部門或合作企業 |
|
大型復雜零件機器人加工理論與技術 |
國家自然科學基金委 |
|
航空復雜零件智能加工裝備 |
數字制造裝備與技術國家重點實驗室 |
|
大型航空結構件多機器人協同銑削加工技術研究 |
國家博士后基金委 |
|
壓鑄島取件噴涂機器人 |
廣州創騰自動化設備有限公司 |
|
視覺導引硅錠搬運機器人及檢測生產線 |
江陰海潤光伏科技股份有限公司 |
|
|
|
|
|
|
3、合作單位


4、專利列表及相關證書

5、聯系方式
華中科技大學無錫研究院 機器人應用技術中心
無錫市惠山經濟開發區堰新路329號
聯系人:張剛 博士
聯系電話:18168902856
電子郵箱:zgrobot@163.com
機器人應用技術中心已建立了一支具有良好知識和年齡結構的隊伍,包括博士4人,工程師8人以及博士生2人、碩士生4人。
主要骨干成員:
主要研究方向:
l 機器人智能加工的在線測量-加工工藝-加工裝備一體化技術;
l 基于六維激光跟蹤儀的機器人標定技術;
l 大行程非接觸式激光跟蹤測量技術;
l 基于2D、3D視覺的物料分揀與視覺導引機器人技術。
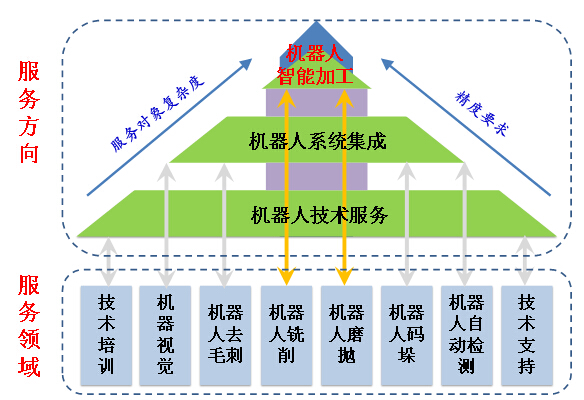
圖1 機器人應用技術中心服務方向與技術領域
核心技術與應用:
l 機器人銑削加工的測量-工藝-裝備一體化技術涉及大行程非接觸式激光在線測量、機器人幾何參數標定、基于機器人加工動力學的銑削工藝參數優化和機器人智能加工裝備系統集成等若干項關鍵技術,面向國防、航空、航天等領域,研制機器人銑削加工裝備,促進行業技術升級,相關技術及產品已在國防及民用領域應用;
l 基于六維激光跟蹤儀、Spatial Analyzer測量數據分析軟件,機器人應用技術中心擁有機器人標定核心技術,可在用戶現場開展ABB、KUKA、FANUC等品牌工業機器人標定技術服務,也可對用戶自行研制的工業機器人進行精度檢定與校準方面的技術支持與現場服務;
l 將六維激光掃描儀、3D點云匹配與機器人技術相結合,機器人應用技術中心可為用戶提供大行程非接觸式激光檢測裝備以及大行程非接觸測量、逆向工程方面的技術支持與服務;
l 機器人技術中心將2D、3D機器視覺識別技術與機器人技術相結合,針對雜亂無章的隨機工件,由機器視覺識別工件坐標,實現物料快速識別與機器人定向抓取,替代人工分揀,實現機床上下料及隨機物料搬運的自動化與機器人化。
代表性成果:
(1)機器人銑削加工的在線測量-加工工藝-加工裝備一體化技術
基于國家自然科學基金重大項目“復雜零件機器人加工理論與技術”的研究成果,針對大型航空薄壁結構件鏡像銑削,多機器人的“隨動支撐-在位測量-自適應加工”存在并行協調、同步控制等難題,將機器人技術與數控加工技術相結合,研制大型復雜航空結構件的機器人銑削加工裝備,實現大型復雜航空結構件的在線測量、加工工藝優化與加工裝備一體化。
機器人技術中心目前擁有銑削加工機器人、六維激光跟蹤儀、激光掃描儀、機器人線性導軌、機器人銑削主軸、機器人對刀儀、機器人離線編程軟件等先進機器人銑削加工硬件及軟件,可為用戶提供多機器人協同銑削加工的動力學建模-隨動支撐-補償控制一體化系統解決方案,機器人銑削加工相關研究成果已在國內某航空企業的復合材料蒙皮機器人銑削加工中得到推廣應用。
2015年5月,機器人應用技術中心與德國弗勞恩霍夫制造技術與應用材料研究所(Fraunhofer IFAM)簽定技術交流與合作協議,共同致力于機器人加工技術在中國航空領域的應用研究與技術推廣。
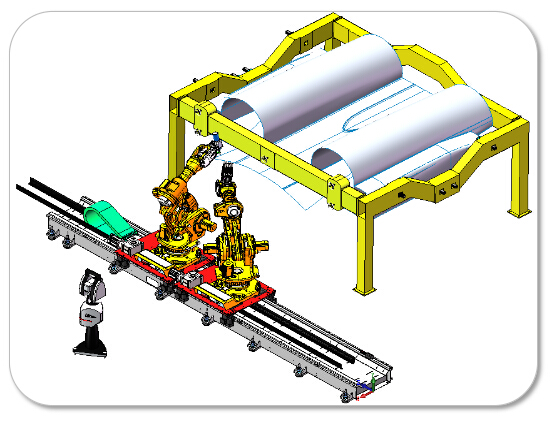
圖2大型航空結構件多機器人協同銑削加工裝備
(2)基于六維激光跟蹤儀的工業機器人標定與校準技術
機器人應用技術中心擁有Leica AT960六維激光跟蹤儀、Spatial Analyzer測量數據分析軟件以及工業機器人標定校準軟件,可區分及補充不同工業機器人模型,識別和補償不同機器人基座系統、工具位置,對工業機器人的不同負載、由彈力造成的重心偏移進行補償,并對工業機器人的軌跡進行分析和精確定位反饋控制。
機器人應用技術中心可在用戶現場開展ABB、KUKA、FANUC等品牌工業機器人標定技術服務,開展機器人位姿準確度,位姿重復性,多方向位姿準確度變動,距離準確度,距離重復性,位置穩定時間,軌跡準確度,軌跡重復性,機器人速度準確度,速度重復性速度波動,振幅和頻率等機器人性能分析和評價,也可對用戶自行研制的工業機器人進行精度檢定與校準方面的技術支持與現場服務。

圖3基于六維激光跟蹤儀的工業機器人參數標定
(3)基于六維激光掃描儀的大型工件非接觸式測量技術
機器人應用技術中心將六維激光掃描技術與機器人技術相結合,可在復雜的現場和空間對被測大型工件進行快速掃描測量,直接獲得激光點所接觸的物體表面的三維坐標、色彩信息和反射強度——點云數據,點云數據經過計算機處理后,結和CAD 可快速重構出被測物體的三維模型及線、面體、空間等各種制圖數據。
機器人應用技術中心可根據客戶的需求,提供大行程非接觸式激光檢測裝備以及大行程非接觸激光測量、逆向工程方面的技術支持與服務。

圖4 大型工件非接觸式激光掃描裝備
(4)基于2D、3D視覺的物料定位與識別及分揀機器人技術
面向太陽能光伏行業,將機器人技術與機器視覺技術相結合,采用機器視覺檢測實現隨機擺放硅錠的精確視覺定位與類型識別,由六軸工業機器人取代傳統人工搬運,實現硅錠的搬運、少子工位上下料和自動碼垛,為客戶提供工業機器人與機器視覺相結合的視覺導引硅錠搬運機器人及粗檢、精檢生產系統整套解決方案。
基于視覺導引的硅錠搬運機器人的主要技術參數及配置清單:
|
主要配置 |
||
|
序號 |
名稱 |
性能參數 |
|
1 |
工業機器人 |
六軸、200Kg負載、可達區域:半徑2米 |
|
2 |
視覺系統 |
美國邦納/美國康納視Cognex(可選) |
|
3 |
控制系統 |
西門子PLC及人機接口HMI |
|
4 |
氣動系統 |
SMC氣動 /FESTO氣動(可選) |
|
性能參數 |
||
|
1 |
搬運效率 |
25分鐘一個大錠,36個小錠的視覺識別與上下料 |

圖4 視覺導引硅錠搬運機器人
視覺導引機器人技術相關的專利成果:
(1) 硅錠自動粗檢生產線,申請號: 201510207503.0
(2) 硅錠自動精檢生產線,申請號: 201510207553.9
(3) 輪轂五軸搬運機器人及夾持機械手,申請號: 201410745341.1
相關實用新型專利:
(1) 硅錠自動粗檢生產線,授權號: ZL201510207503.0
(2) 硅錠自動精檢生產線,授權號: ZL201520264158.X
(5)壓鑄島取件噴涂機器人
基于現場總線的壓鑄機與取件機器人、噴涂機器人實時數據通訊技術,實現壓鑄機與取件噴涂機器人的無縫集成,可根據不同壓鑄機生產線的技術要求,通過更換不同規格取件機械手、噴涂寶塔頭,實現不同壓鑄機快捷、靈活、準確的的取件、噴涂作業,提高壓鑄機的自動化與機器人化水平,減輕勞動強度,節約人力成本。
基于現場總線的壓鑄島取件噴涂機器人的主要技術參數及配置清單:
|
主要配置 |
||
|
序號 |
名稱 |
性能參數 |
|
1 |
取件機器人 |
六軸、160Kg負載、可達區域:半徑2.1米 |
|
2 |
噴涂機器人 |
六軸、100Kg負載 |
|
3 |
控制系統 |
西門子PLC及人機接口HMI |
|
4 |
氣動系統 |
FESTO氣動 |
|
5 |
通訊方式 |
Profibus現場總線通訊 |
|
性能參數 |
||
|
1 |
生產效率 |
3分鐘完成汽車發動機壓鑄件的取料、噴涂作業 |
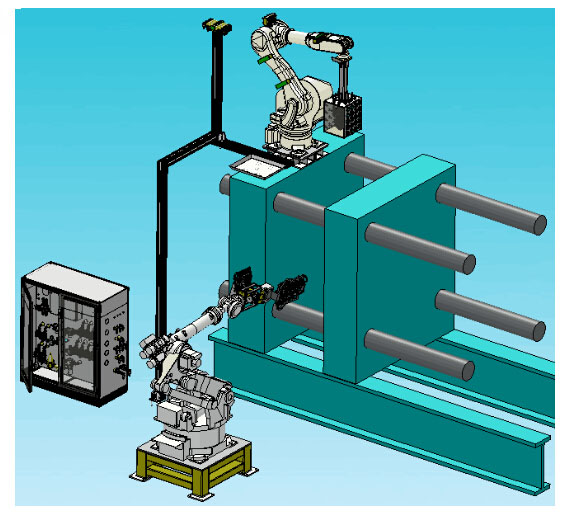
圖5 取件噴涂機器人生產系統